C-MobILE Project saves lives

Every year, 13.000 cyclist in the Netherlands are involved in road accidents. No less than eleven percent of these accidents caused by collisions with cars, buses and other vehicles. One of the most dangerous junctions for cyclists in Eindhoven is at the Neckerspoel bus station, which at least once a day sees a ‘near-accident’ between a bus and a cyclist. To improve this situation, the municipality of Eindhoven, research organization TNO, TU/e and MACQ engaged a multidisciplinary group of PDEng trainees from the TU/e.
The assignment given to the PDEng trainees was short, but clear: preventing collisions. After an initial analysis, four risky situations at Neckerspoel were identified as particularly risky. The assignment focused on the crossing where both cyclists and buses move and then cross each other’s paths. To prevent accidents here, only two options exist: either the cyclist stops or the bus.
Topology
To determine whether it is realistic that the cyclist and/or the bus driver stops, the trainees first designed a classification of the different cyclists and drivers. It appears that both categories can be subdivided into three distinctive ‘types’: the attentive road user, who will always stop; the reckless one, who will never stop; and the distracted road user who is somewhere in between these two extremes. This group includes drivers who stop when they get a traffic warning. It also includes cyclists who will only stop for a bus when they get a traffic warning. In other words: this ‘middle category’, the distracted road users, will do their best to prevent a collision, be it at the last minute.
Considering different behavior of cyclists and bus drivers, nine possible scenarios arise for the intersection in question. The trainees tested three scenarios, excluding only the reckless drivers and road users. However, since the system is designed for all categories, reckless drivers will also get warned. “Reckless drivers will not stop whatever system is being devised”, while careful drivers “seem they will always stop and therefore do not need a system”, according to the students. “But we didn’t exclude any of them. The system is designed for all categories.”
Warning Service
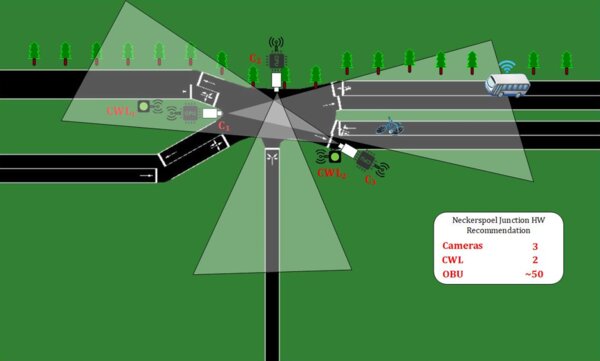
The PDEng trainees subsequently developed a warning service to prevent collisions, consisting of two parts:
- A Cyclist Warning Light (CWL): a traffic light that turns red when a bus is within a certain distance;
- An On Board Unit (OBU): an automatic braking system that is activated when a cyclist ignores the CWL-warning and collision is eminent in 3,5 seconds.
With this system the cyclist is first warned when it is no longer safe to cross. If the cyclist ignores this signal and continues, the bus is stopped.
Since it is not realistic to start testing in real life, a simulation was set up to test the components. This consisted of three parts:
- Chaotic world: as it is now, without warning service
- CWL & cameras
- OBU & CWL & cameras.
Not entirely surprising, the warning service appears to work perfectly in simulation environment with the selected test cases: the number of collisions decreased to zero. One of the key recommendations of the PDEng therefore is to implement the warning service as soon as possible. The software package is ready, now it’s time to install cameras, CWLs and OBUs and to teach people how to work with them. A nice side effect is that all risky situations are identified and warnings are issued to prevent all possible collisions, so it is easy to extend to other intersections and even other cities.
Reality?
Of course the trainees realize things are not that simple in real life. How, for instance, will drivers react when the warnings are issued to them in case of identification of a risky situation? And how do cyclists behave when they know that a bus is forced to stop? Will they then all ignore the CWL and still drive on? The only way to find out is to start using the warning service in reality and see how it works, so that real data become available. Simulations may be valuable, but at the end of the day they are just that: simulations.
Despite these reservations, Hermes, TNO and the municipality of Eindhoven are very happy with the results. “Unfortunately, several accidents have already happened at the Neckerspoel bus station. Even if this system saves only one human life, it is already worth using. An additional advantage of this is that it is not necessary to relocate entire cycle paths or build bridges.” Both partners also complement the trainees for the fine cooperation.
Educational trajectory
And the trainees themselves? They indicate that the whole process has been a very informative indeed. Certainly collaborating in a multidisciplinary team, with trainees from Software Technology, Mechatronic Systems Design and Automotive Systems Design working together, was new to them. This provided all kinds of new insights. “You notice that colleagues from a different discipline also view things differently. And also come up with other solutions.”
They also enjoyed working with multiple stakeholders of the C-MobILE project. “This certainly demanded something of our flexibility, because we were dealing with four different stakeholders with different agendas and priorities. A good learning school for how things will work out in the real life business world!”

PDEng ST/ASD/MSD programs
The two-year salaried post-Master designer programs Software Technology (ST), Automotive Systems Design (ASD) and Mechatronics Systems Design (MSD) prepare trainees for a career in the high-tech industry as technological designer, and later on as a software or system architect. The programs consist of a number of modules dedicated to specific parts of the underlying scientific fields and technology domains. One of these modules is devoted to Software Embedded Systems, which plays an increasingly important role in both Automotive and Mechatronics. The programs are concluded with a major design project of 10-12 months in a company.